NavFn Planner + MPPI Controller
This configuration utilizes the NavFn Planner for global path planning and the MPPI (Model Predictive Path Integral) Controller for local trajectory optimization. This combination is designed to balance efficiency, smoothness, and dynamic obstacle handling.
Why MPPI Controller is a Good Choice
The MPPI Controller is well-suited for dynamic environments requiring real-time adjustments. It optimizes trajectories by considering the robot’s dynamics and environmental constraints, making it highly effective for:
Dynamic Obstacle Avoidance: Evaluates multiple trajectories to select the optimal path while avoiding collisions.
Smooth Path Generation: Produces jerk-free motions for stable operations.
Real-Time Performance: Delivers responsive and efficient control in dynamic scenarios.
Relevant Parameters for MPPI Controller
Parameter |
Value |
Description |
|---|---|---|
time_horizon |
1.5 |
Time horizon over which the trajectory is optimized. |
desired_linear_velocity |
0.5 |
Target velocity for the robot’s linear motion. |
desired_angular_velocity |
1.0 |
Target velocity for the robot’s angular motion. |
linear_acceleration_limit |
2.0 |
Maximum allowed linear acceleration for smoother motion. |
angular_acceleration_limit |
3.0 |
Maximum allowed angular acceleration for smoother turns. |
optimizer_iterations |
1000 |
Number of iterations for trajectory optimization in each cycle. |
cost_weights.path_following |
10.0 |
Weight for staying close to the planned path. |
cost_weights.collision_avoidance |
15.0 |
Weight for avoiding collisions with obstacles. |
cost_weights.smoothness |
5.0 |
Weight for ensuring smooth trajectories. |
lookahead_dist |
0.6 |
Distance ahead of the robot for trajectory optimization. |
transform_tolerance |
0.1 |
Tolerance for transform lookups to ensure stability in real-time adjustments. |
visualize_optimizer |
true |
Enables visualization of the optimized trajectories for debugging in RViz. |
Testing Scenarios and Observations
The robot’s performance was evaluated under three scenarios using this combination:
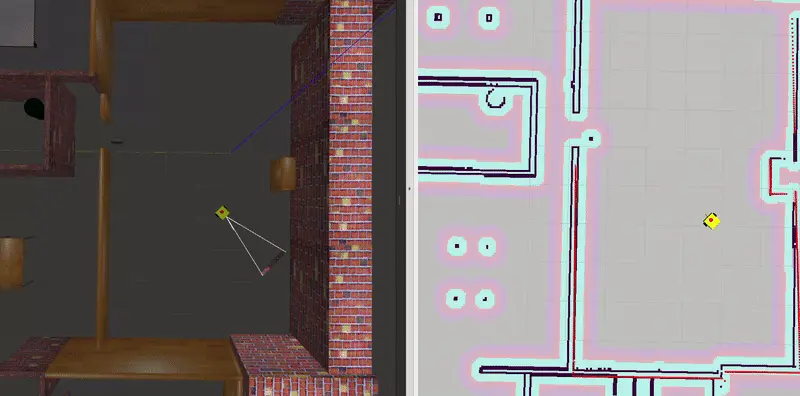
Straight-Line Movement - The robot followed a smooth and precise trajectory with minimal drift. - Real-time trajectory optimization ensured stable motion.
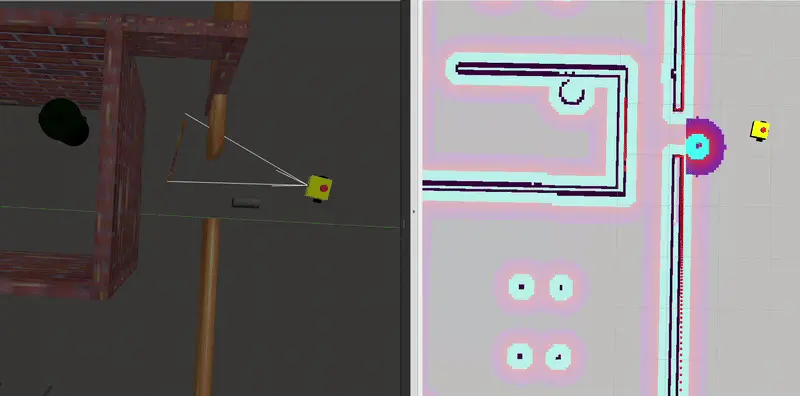
Navigating Static Obstacles - The controller successfully adjusted the robot’s path to avoid obstacles, maintaining smooth transitions. - Dynamic trajectory optimization minimized unnecessary deviations.
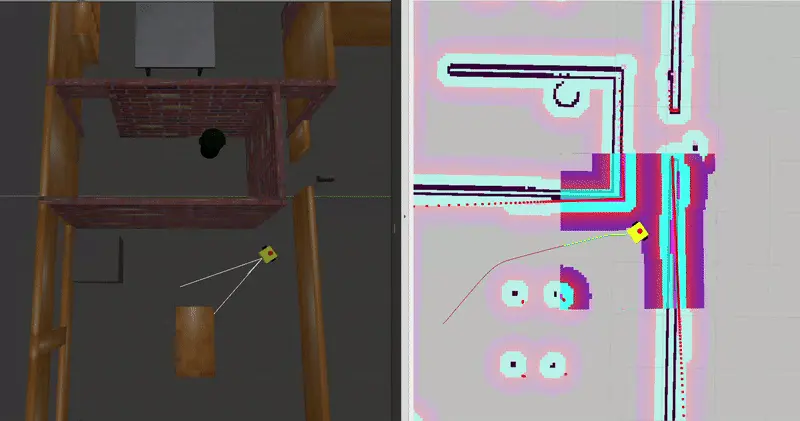
Navigating Dynamic Obstacles - The robot responded effectively to moving obstacles, recalculating the trajectory in real time. - The robot maintained a safe distance from the moving object. - Optimized control commands reduced delays in avoiding faster-moving objects.
Performance Summary
Scenario |
Performance |
|---|---|
Straight-Line Movement |
Smooth and precise navigation. |
Static Obstacles |
Reliable obstacle avoidance with smooth trajectory adjustments. |
Dynamic Obstacles |
Effective real-time responses to moving obstacles. |
Conclusion
The combination of NavFn Planner and MPPI Controller provided robust performance across all scenarios. Its ability to handle dynamic obstacles and generate smooth trajectories makes it an excellent choice for complex environments.
Future Improvements: - Further tuning of cost weights and time horizon could enhance responsiveness in highly dynamic settings. - Exploring alternate global planners, such as Smac (Hybrid-A*), may yield better path efficiency for intricate environments.